Top

Stay Inspired with Instagram



search here ...
People also search for:








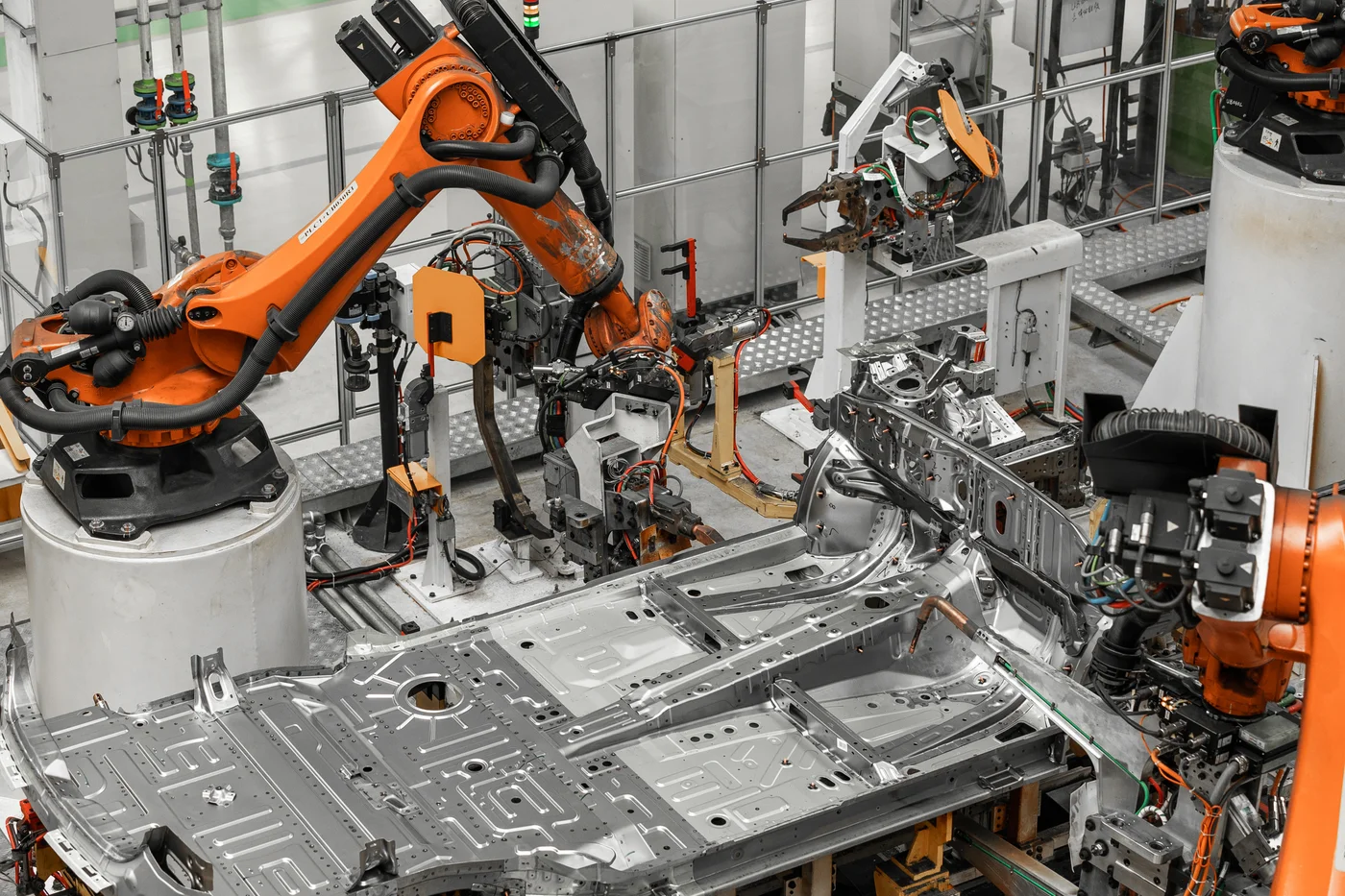
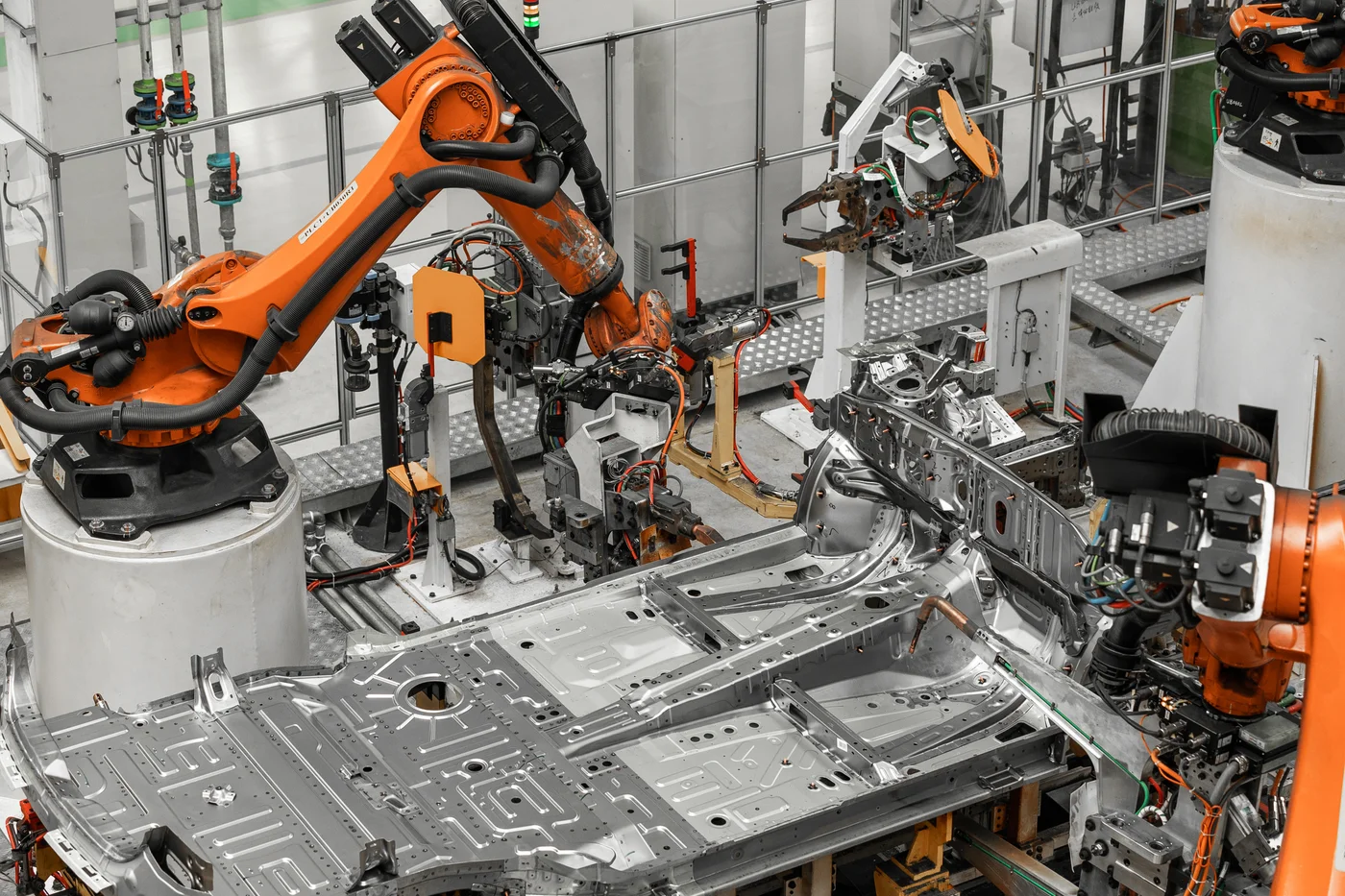
 Inginerie pentru Celule Robotice Pick and Place
Inginerie pentru Celule Robotice Pick and Place
Celule Pick & Place Proiectate pentru Stabilitate Industrială
In RCE proiectăm celule robotice ca sisteme de control al comportamentului de manipulare în condiții reale de variație.
In sistemele Pick & Place, performanța nu este determinată de robot, ci de comportamentul întregului sistem in conditii de variație a produsului, poziționării și fluxului.
Problema reală este lipsa controlului asupra interacțiunilor dintre mecanică, vision, timing și alimentarea pieselor.
- Instabilitate generată de variație
- Propagarea deviațiilor în sistem
- Comportament operațional imprevizibil
- Complexitate fără control
Comportament controlat al sistemului
Controlăm modul în care variația apare și se propagă pentru a menține stabilitatea operațională.
Adaptare fără pierdere de performanță
Sistemele rămân stabile și predictibile în condiții de schimbare a produsului, volumului și ritmului de producție.
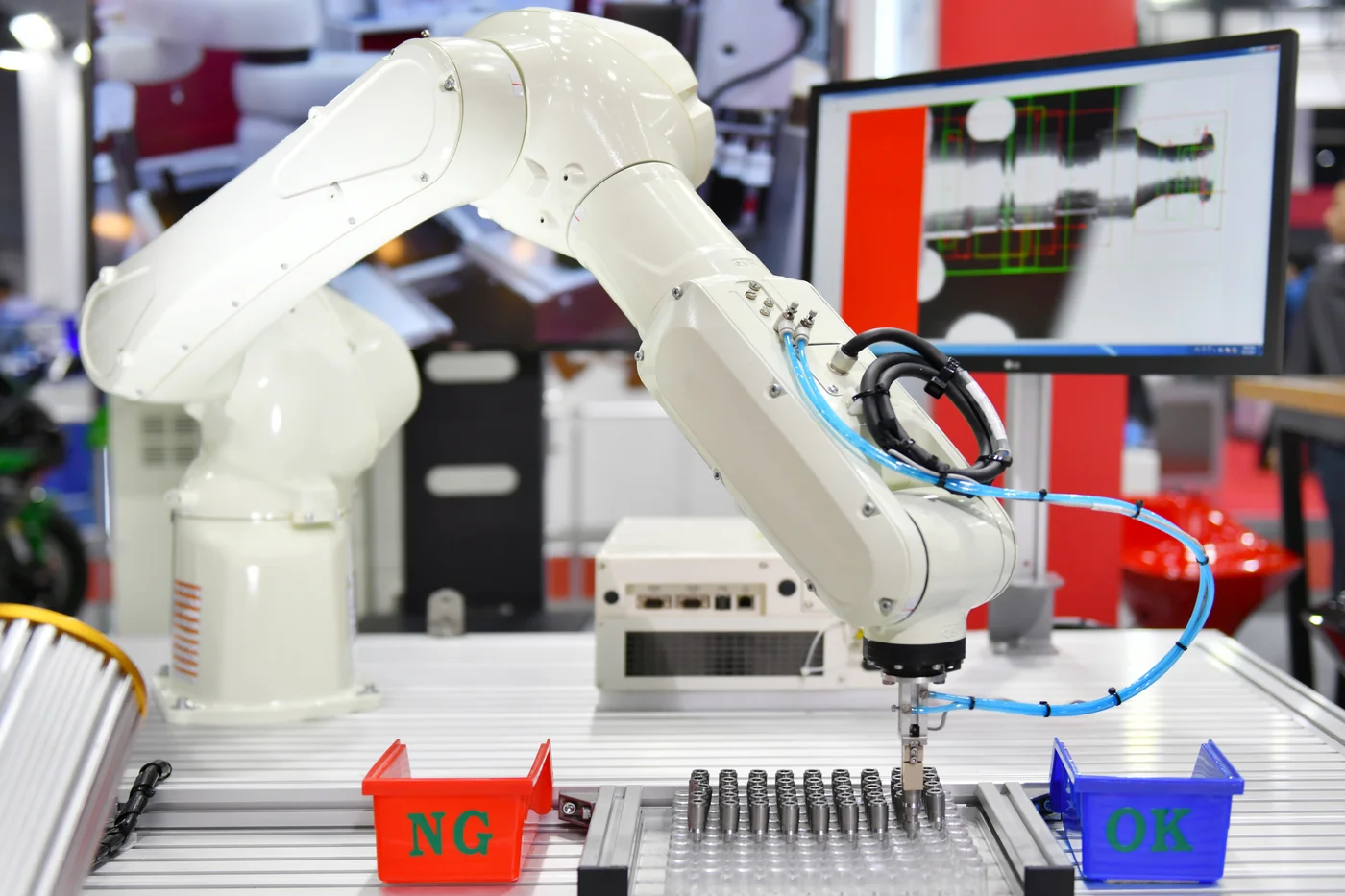
Interacțiunea Vision–Motion
Când percepția devine variație în control.Datele de poziție generate de vision nu sunt doar informație, ci intrări dinamice în logica de mișcare. În condiții de variație, aceste semnale nu mai sunt stabile, iar sistemul de motion reacționează la fluctuații, nu la realitate.
Variația poziției și sincronizarea temporală
Când timing-ul nu mai este constant. În Pick & Place, precizia nu este doar spațială, ci și temporală. Micile deviații de poziție modifică momentul execuției, iar aceste ajustări se propagă în întregul ciclu operațional, afectând consistența execuției.
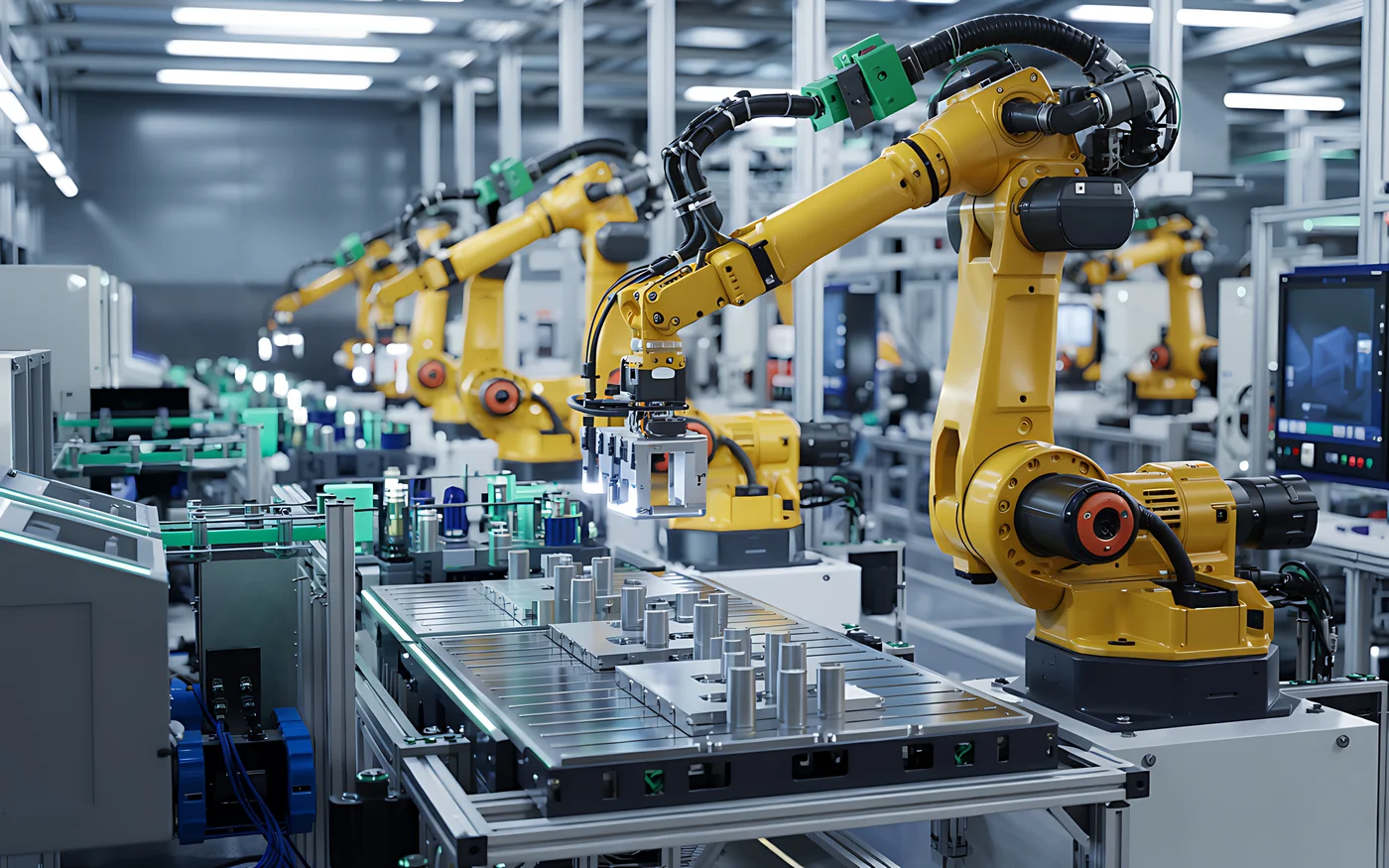
Alimentare automată a liniilor de asamblare
Fluxul de alimentare și cycle time-ul Când intrarea definește comportamentul sistemului Fluxul de piese nu este o condiție pasivă. Variabilitatea sa modifică direct dinamica ciclului, ceea ce duce la instabilitate în cycle time și la variații în comportamentul general al celulei.
Manipulare piese sensibile sau fragile
În cazul componentelor fragile, instabilitatea nu generează doar retry-uri — generează rebut. Prin control mecanic al preluării, stabilizarea contactului și modelare clară a secvenței, reducem șocurile, micro-decalajele și variațiile necontrolate.
Transfer între procese cu ritm diferit
Atunci când robotul conectează două procese cu dinamici diferite, lipsa unei arhitecturi stabile duce la blocaje sau acumulări necontrolate. Proiectăm interfețe contractuale și mecanisme de sincronizare care mențin controlul sistemului chiar și în condiții de variație temporară.
Aplicații cu variație mare upstream
Când piesele provin din procese instabile (operatori manuali, alimentare bulk, transport variabil), instabilitatea este inevitabilă la intrare. În loc să o compensăm prin logică excesivă, o controlăm prin stabilizare fizică, zone de pre-poziționare și modelare clară a condițiilor de gardă.
Manipulare piese cu toleranțe variabile
Când poziția, forma sau orientarea piesei nu sunt perfect controlate, sistemele tradiționale compensează prin retry-uri și corecții suplimentare.
Prin stabilizare mecanică, modelare deterministă a comportamentului și integrare contractuală între subsisteme, reducem dependența de compensare software și creștem repetabilitatea ciclului.
Integrare cu Sisteme Vision
Aplicațiile cu ghidare Vision introduc variație suplimentară prin latență, incertitudine de poziție și corecții succesive.
Proiectăm arhitectura astfel încât Vision să fie parte integrată din modelul comportamental al celulei, nu un layer reactiv de corecție.
Rezultatul este reducerea corecțiilor multiple și stabilizarea ciclului real.
Alimentare automată a liniilor de asamblare
În aplicațiile unde robotul alimentează procese downstream sensibile la timing, deviațiile de ciclu se propagă în întregul flux. Controlul variației și sincronizarea deterministă a stărilor reduc efectul de undă și mențin predictibilitatea liniei.
Manipulare piese sensibile sau fragile
În cazul componentelor fragile, instabilitatea nu generează doar retry-uri — generează rebut. Prin control mecanic al preluării, stabilizarea contactului și modelare clară a secvenței, reducem șocurile, micro-decalajele și variațiile necontrolate.
Transfer între procese cu ritm diferit
Atunci când robotul conectează două procese cu dinamici diferite, lipsa unei arhitecturi stabile duce la blocaje sau acumulări necontrolate. Proiectăm interfețe contractuale și mecanisme de sincronizare care mențin controlul sistemului chiar și în condiții de variație temporară.
Aplicații cu variație mare upstream
Când piesele provin din procese instabile (operatori manuali, alimentare bulk, transport variabil), instabilitatea este inevitabilă la intrare. În loc să o compensăm prin logică excesivă, o controlăm prin stabilizare fizică, zone de pre-poziționare și modelare clară a condițiilor de gardă.
Proiectele noastre
Enginerie simpla la exterior și extrem de inteligentă la interior.



 Discuta cu un inginer
Discuta cu un inginer
Construieste sisteme stabile
în condiții de variabilitate