Integrare mecanică
Proces (fixare, ghidare, constrângere controlată)












 Abordarea noastră
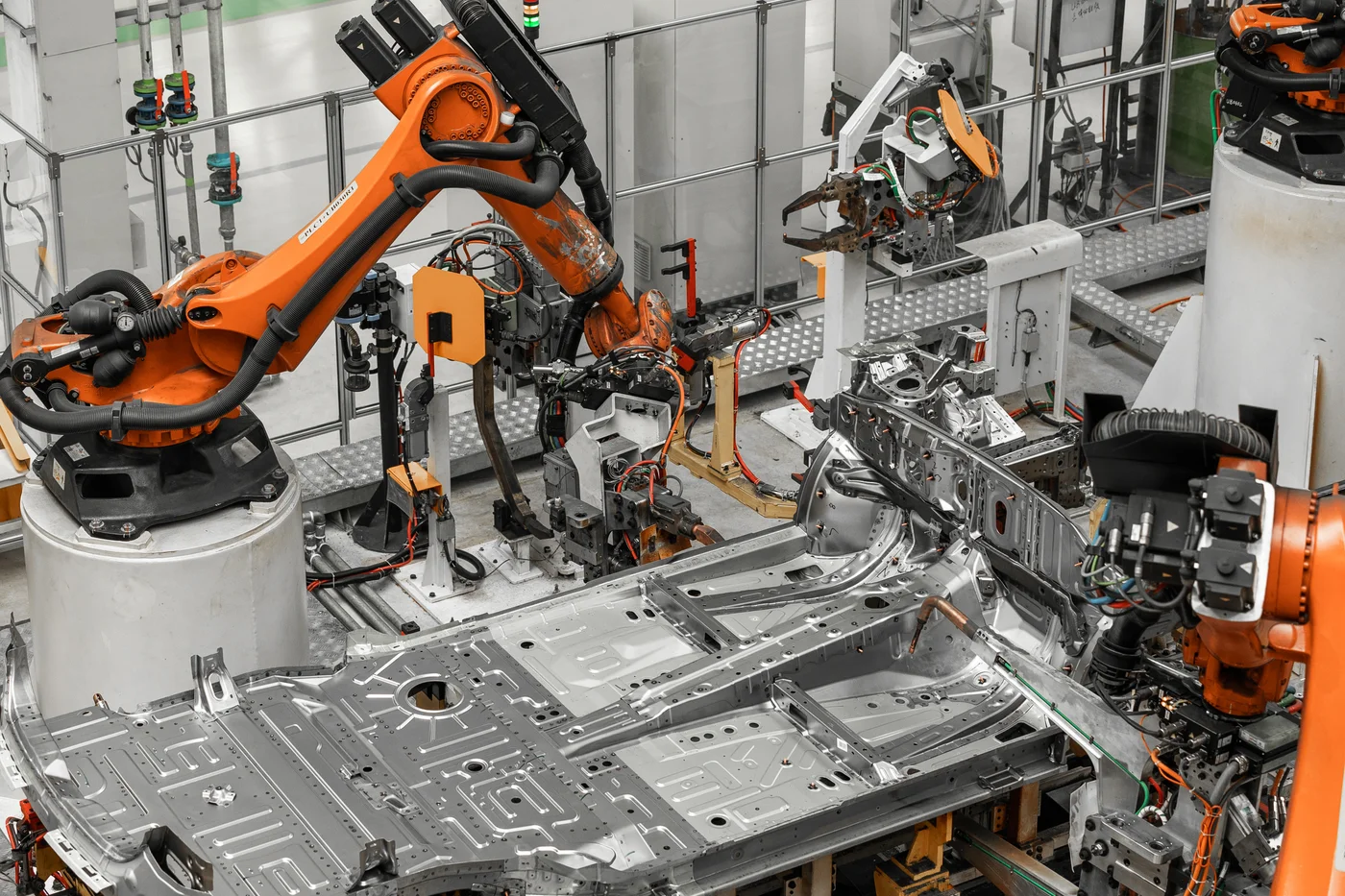
Abordarea noastră Proiectăm, producem si implementam sisteme robotice care rămân stabile la creștere volum, schimb de lot și audit OEM.
Integram mișcarea, parametrii critici și constrângerea mecanică într-o arhitectură controlată, validată și scalabilă.
Mișcare repetabilă ≠ proces controlat


workforce was very quick & efficient.
workforce was very quick & efficient.
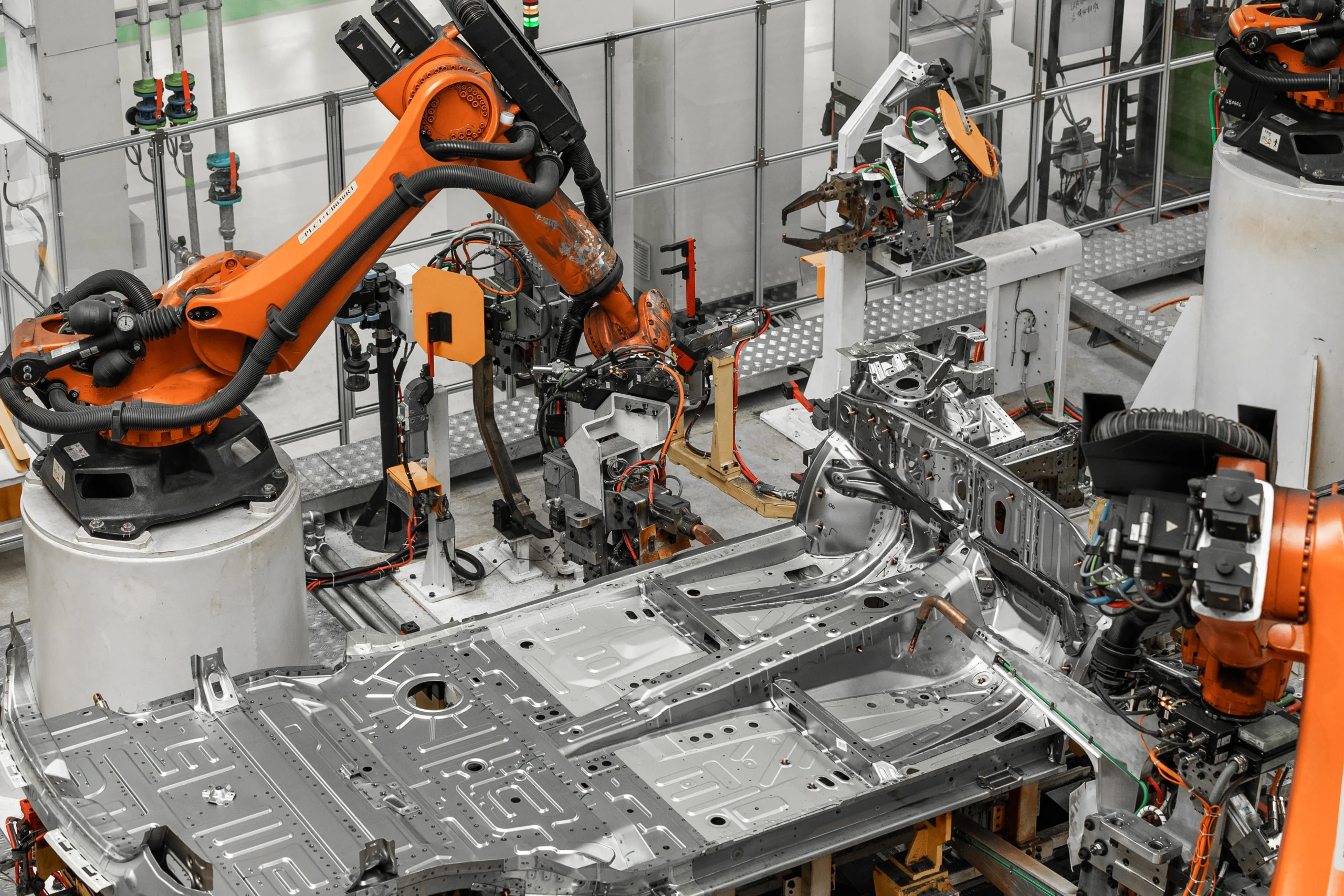
La volum redus, variațiile par gestionabile. La ramp‑up, se acumuleaza. Un fixture flexibil, referințe multiple sau grade de libertate necontrolate introduc deviații care nu sunt vizibile în faza de validare inițială. Robotul își repetă poziția dar piesa nu repeta aceeasi pozitie.
Parametrii critici sunt setați, dar nu corelați cu dinamica reală a mișcării. Forța este definita nominal iar timpul este progamat 'static'. Energia este setată independent de variația dimensională. La ramp‑up, această decuplare produce deviații recurente, greu de anticipat.
Un proces poate respecta toleranța și totuși să fie instabil. Fără monitorizare în ciclu a parametrilor critici, variația nu este vizibilă în timp real. Defectele apar intermitent, nu constant — ceea ce le face dificil de diagnosticat. Volumul accelerează fenomenul.
FAT validează funcționarea într-un scenariu controlat. Producția testează robustețea în condiții reale. Multe sisteme sunt optimizate pentru demonstrație și validare punctuală, nu pentru trei schimburi continue, uzură progresivă și variație reală de material.
Proces (fixare, ghidare, constrângere controlată)

Proces (forță, poziție, timp, energie)
și monitorizare parametrică
Audit și analiză cauză‑efect
(MES, Quality, Flow)

Procese cu toleranțe strânse și cerințe OEM stricte Volume mari, ramp‑up accelerat și schimb frecvent de variante Operații sensibile la forță, poziție și energie (asamblare, sudură, adezivi) Control parametric și trasabilitate pentru audit și conformitate
Inserări, presări și conectică sensibile la variație dimensională Ansambluri cu toleranțe cumulative și risc de defecte latente Control forță–deplasare pentru funcționalitate garantată Stabilitate proces la schimb de lot și modificări constructive

Volume mari și presiune pe cost și timp ciclu Variabilitate materială (plastice, elastomeri, subansamble) Procese de lipire, sudură și asamblare cu cerințe estetice ridicate Reducerea rebuturilor și a intervențiilor operatorilor

Manipulare multi‑variantă și schimb rapid de SKU Pick & place cu cerințe de viteză și repetabilitate Integrare în fluxuri existente și sisteme WMS/MES Stabilitate operațională la variație de volum și sezonalitate
Identificăm sursele reale de variație: toleranțe cumulative, schimb de lot, uzură, diferențe între schimburi. Proiectarea începe de la deviațiile probabile, nu de la condiții ideale.
Corelăm traiectoria, dinamica și secvențierea cu parametrii critici (forță, timp, energie, poziție). Mișcarea nu este programată izolat, ci integrată în comportamentul procesului.

Proiectăm fixarea și referențierea pentru a elimina gradele de libertate necontrolate. Poziția piesei devine predictibilă, nu probabilistică
Monitorizăm și corelăm parametrii critici la fiecare ciclu. Controlul procesului este demonstrabil, nu presupus.
Proiectele noastre
Discuta cu un ingiger RCE